توسط matlabfile | تیر 14, 1397 | رباتیک
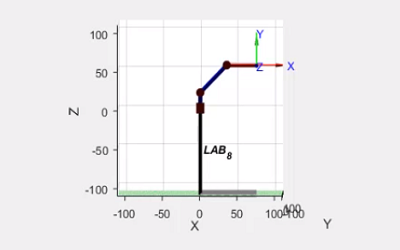
در این پروژه هر دو سینماتیک معکوس و رو به جلو یک ربات در بخش GUI متلب شبیه سازی شده است که با دریافت فایل های شبیه سازی آن قادر به اجرای این پروژه در نرم افزار Matlab خواهید بود. سینماتیک شاخه¬ ای از مکانیک است که به توصیف حرکت اجسام و مایعات بدون در نظر گرفتن نیروهای...
توسط matlabfile | تیر 14, 1397 | رباتیک
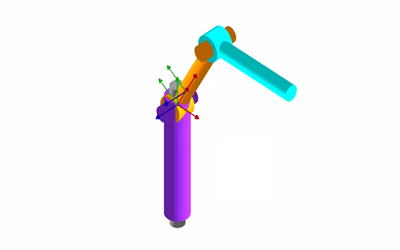
ربات اسکلت خارجی در سال های اخیر توجه بسیاری از پژوهشگران را به خود جلب نموده است. آرزوی دیرینه محققان دست یابی به وسیله ای است که به صورت پوششی حول بدن انسان قرار گیرد و با عملگرهای قدرتمندش، توانایی او را چندین برابر کند. هماهنگی کامل حرکات ربات با بدن پیچیدگی اصلی...
توسط matlabfile | تیر 14, 1397 | رباتیک
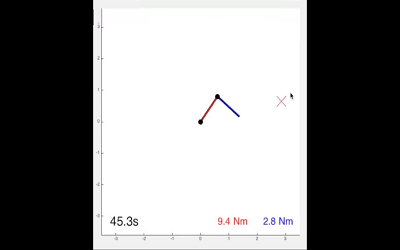
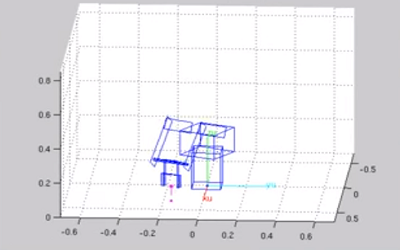
در این پروژه که از سایت متلب فایل قابل دانلود می باشد، به راحتی می توان با در اختیار داشتن معادلات حرکت یک ربات، چگونگی حرکت یک ربات را در فضای سه بعدی به آسانی و با دقت قابل ملاحظه ای شبیه سازی کرد. این نرم افزار که بر مبنای متلب طراحی شده است. این امکان را به محققان...
توسط matlabfile | تیر 13, 1397 | رباتیک
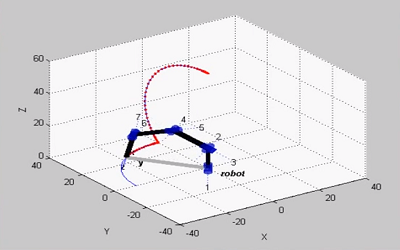
در بسیاری از ربات ها هدف طراحی کنترل کننده ای است که تحت آن، ربات یک مسیر مشخص را دنبال کند. به دنبال این تراکینگ (Tracking) عملیات مورد نظر نیز انجام خواهد شد. در این پروژه یک ربات که یک مسیر مشخص را دنبال می کند شبیه سازی شده است. بلافاصله بعد از پرداخت به ایمیل شما...
توسط matlabfile | تیر 13, 1397 | رباتیک
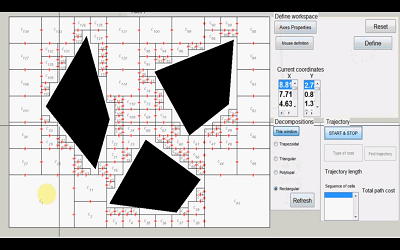
در این پروژه از سایت متلب فایل، کدهای مربوط به شبیه سازی ربات های نوع Mobile Robots در بخش GUI متلب قابل دریافت هستند. شما به راحتی می توانید این کد ها را از این بخش دانلود کنید. بلافاصله بعد از پرداخت به ایمیل شما ارسال می گردد دریافت فایل اجرایی این شبیه سازی در نرم...
توسط matlabfile | تیر 13, 1397 | رباتیک
شبیه سازی و کنترل انواع ربات ها در نرم افزار متلب یکی از چالش های اصلی طراحان است. قبل از ساخت یک ربات، تست و کنترل آن در فضایی مجازی نیاز اصلی هر محقق و طراح است تا ایرادات و نقایص کار برطرف شود. نرم افزار قدرتمند متلب این محیط را در اختیار طراحان قرار میدهد. در این...