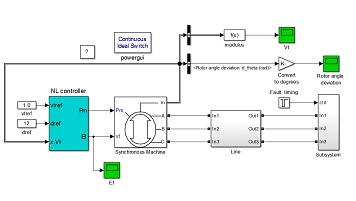
در این شبیه سازی توسط یک کنترلر غیر خطی چند ورودی و چند خروجی یک ژنراتور سنکرون متصل شده به شین بی نهایت را کنترل می کنیم. کنترلر بصورت حلقه بسته و فیدبک دار عمل می کند. هدف کنترل زاویه توان روتور جهت ارتقای پایداری سیستم است.
شما میتوانید تنها با یک کلید به راحتی فایل مورد نظر را دریافت کنید. 🙂
با عضویت ویژه در سایت MatlabFile به تمامی آرشیو فایل های موجود دسترسی پیدا کرده و قادر به دریافت تمام فایل های اجرایی متلب و آموزش های ویدیویی ارائه شده در این سایت خواهید بود.




 جهت تغذیه بار غیر خطی شبکه قدرت در Matlab")
