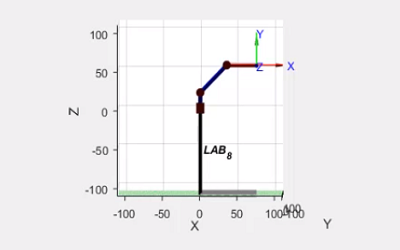
در این پروژه هر دو سینماتیک معکوس و رو به جلو یک ربات در بخش GUI متلب شبیه سازی شده است که با دریافت فایل های شبیه سازی آن قادر به اجرای این پروژه در نرم افزار Matlab خواهید بود.
سینماتیک شاخه¬ ای از مکانیک است که به توصیف حرکت اجسام و مایعات بدون در نظر گرفتن نیروهای تولیدکننده¬ حرکت می ¬پردازد. سینماتیک مستقیم و معکوس در رباتیک به بررسی موقعیت اندفکتور و تغییرات آن نسبت به تغییرات زوایای مفاصل می پردازد. هنگام بررسی مکانیزم ¬های مفصل ¬دار همانند انواع ربات¬ ها، علم سینماتیک به تحلیل هر یک از رابط¬های ربات نسبت به یک چهارچوب مرجع سروکار دارد و شامل موارد زیر است:
1. توصیفی تحلیلی از حرکت نسبت به زمان؛
2. رابطه¬ای غیرخطی مابین موقعیت و جهت¬گیری مجری نهایی و پیکربندی ربات.
حال آنکه هنگام بررسی و تحلیل سینماتیکی ربات ¬ها با دو مسئله روبرو هستیم:
1. مسئله¬ سینماتیک مستقیم
2. مسئله¬ سینماتیک معکوس
در سینماتیک مستقیم و معکوس موقعیت یابی ربات حائز اهمیت است. هدف از سینماتیک مستقیم، بدست آوردن موقعیت و جهت¬ گیری مجری نهایی با توجه به پیکربندی رابط ¬های میانی ربات است. اما هدف از سینماتیک معکوس، بدست آوردن موقعیت و جهت¬گیری رابط¬های میانی ربات با توجه به موقعیت و جهت-گیری مجری نهایی است. برای توصیف موقعیت ربات، چهارچوب¬های مختلفی را می¬توان به کار برد. بعنوان مثال می¬توان از دستگاه¬های مختصات کارتزین، استوانه ا¬ی و کروی استفاده کرد. انتخاب نوع دستگاه مختصات به ساختار سینماتیک ربات بستگی دارد.
بیان ماتریس انتقال یکی از مهمترین گام ها در تبیین سینماتیک مستقیم در رباتیک می باشد. این ماتریس از طریق بحث زوایای اویلر نوشته می شود و به منظور بدست آوردن حرکت های انتقالی و چرخشی دو مفصل مجاور نسبت به هم کاربرد دارد.
دریافت فایل اجرایی این شبیه سازی در نرم افزار Matlab
با عضویت ویژه در سایت MatlabFile به تمامی آرشیو فایل های موجود دسترسی پیدا کرده و قادر به دریافت تمام فایل های اجرایی متلب و آموزش های ویدیویی ارائه شده در این سایت خواهید بود.



 در نرم افزار matlab")
