کنترل سیستم تعلیق مغناطیسی با استفاده از فیدبک حالت در متلب
با عضویت ویژه در سایت MatlabFile به تمامی آرشیو فایل های موجود دسترسی پیدا کرده و قادر به دریافت تمام فایل های اجرایی متلب و آموزش های ویدیویی ارائه شده در این سایت خواهید بود.
در این ویدئو آموزشی موضوع بررسی پایداری سیستم تعلیق مغناطیسی بخاطر اهمیت آن مورد بحث قرار گرفته است. ابتدا توضیح مختصری در ارتباط با دینامیک و مدل ریاضی آن داده می شود. مدل فضای حالت آن ارائه می شود و پایداری سیستم حلقه باز به وسیله روش مکان هندسی ریشه ها و معیار روت هرویتز مورد بررسی قرار می گیرد. با توجه به اینکه سیستم حلقه باز دارای پایداری مرزی است، قانون کنترل مبتنی بر روش فیدبک حالت و جایابی قطب های مطلوب طراحی می شود. تمام این مراحل در نرم افزار متلب طراحی و شبیه سازی شده و در حین آموزش نحوه شبیه سازی بیان میشود. فایلهای شبیه سازی و فایل توضیحات به طور کامل در اختیار شما قرار خواهد گرفت.
کدام مخاطب به این آموزش نیاز دارد؟
دانشجویان و فارغ التحصیلان رشته برق
فهرست مطالب
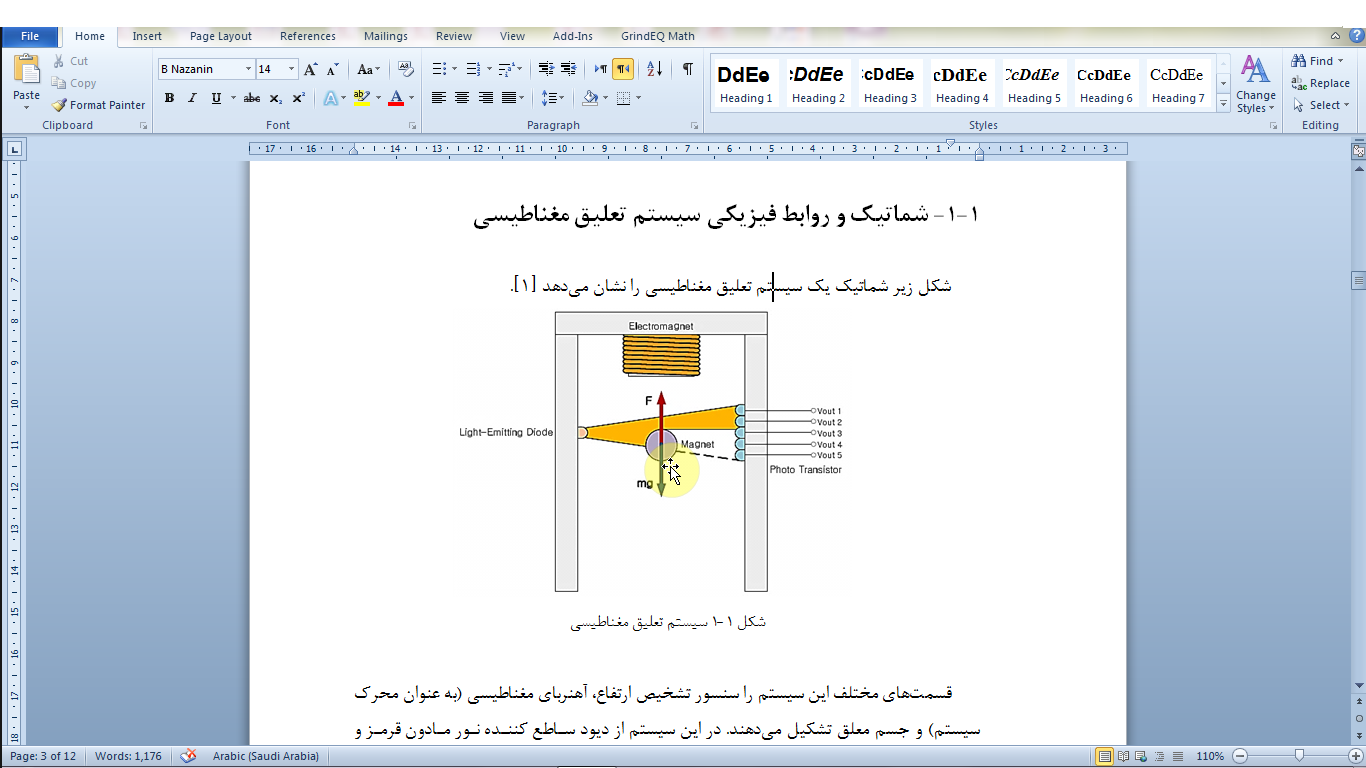
◄ معرفی سیستم تعلیق مغناطیسی
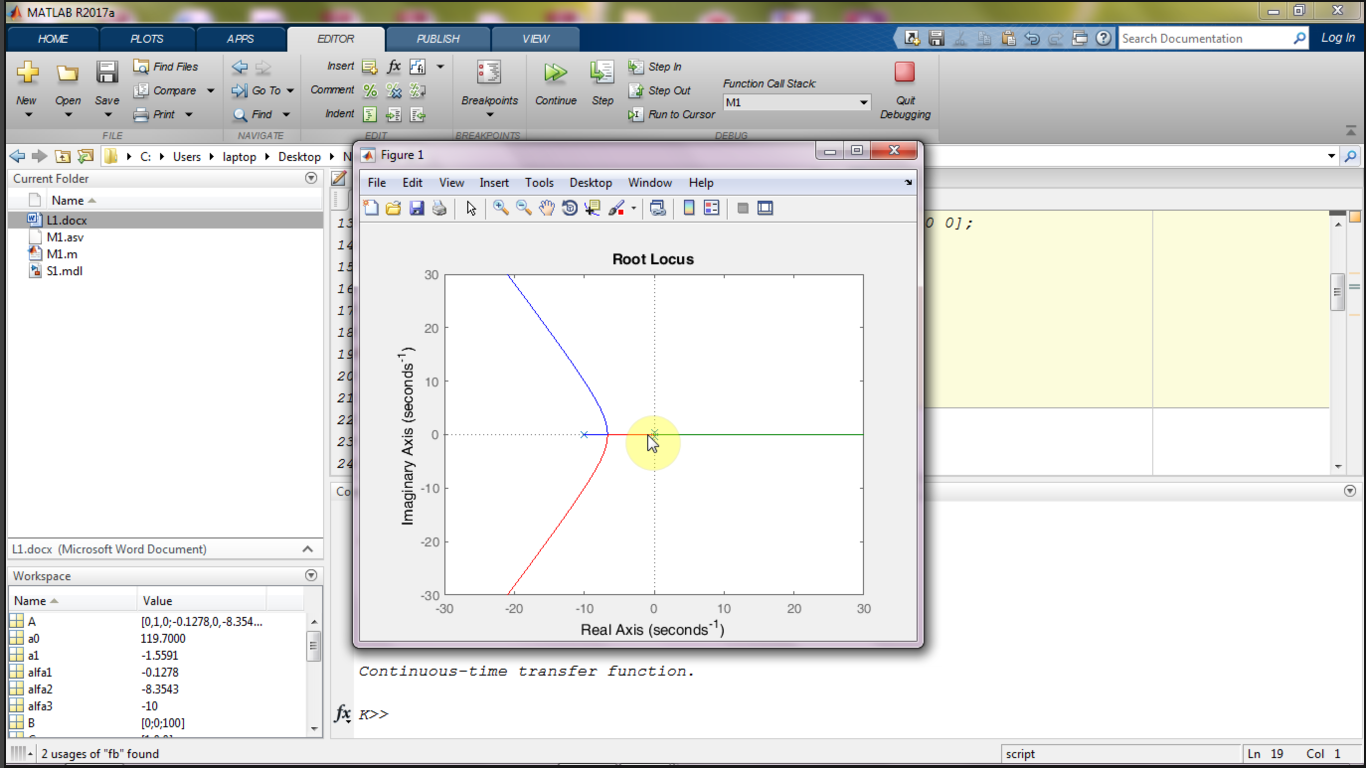
◄ تحلیل پایداری سیستم حلقه باز در متلب (مکان هندسی ریشه ها و روش روت هرویتز)
◄ طراحی قانون کنترل با استفاده از روش فیدبک حالت
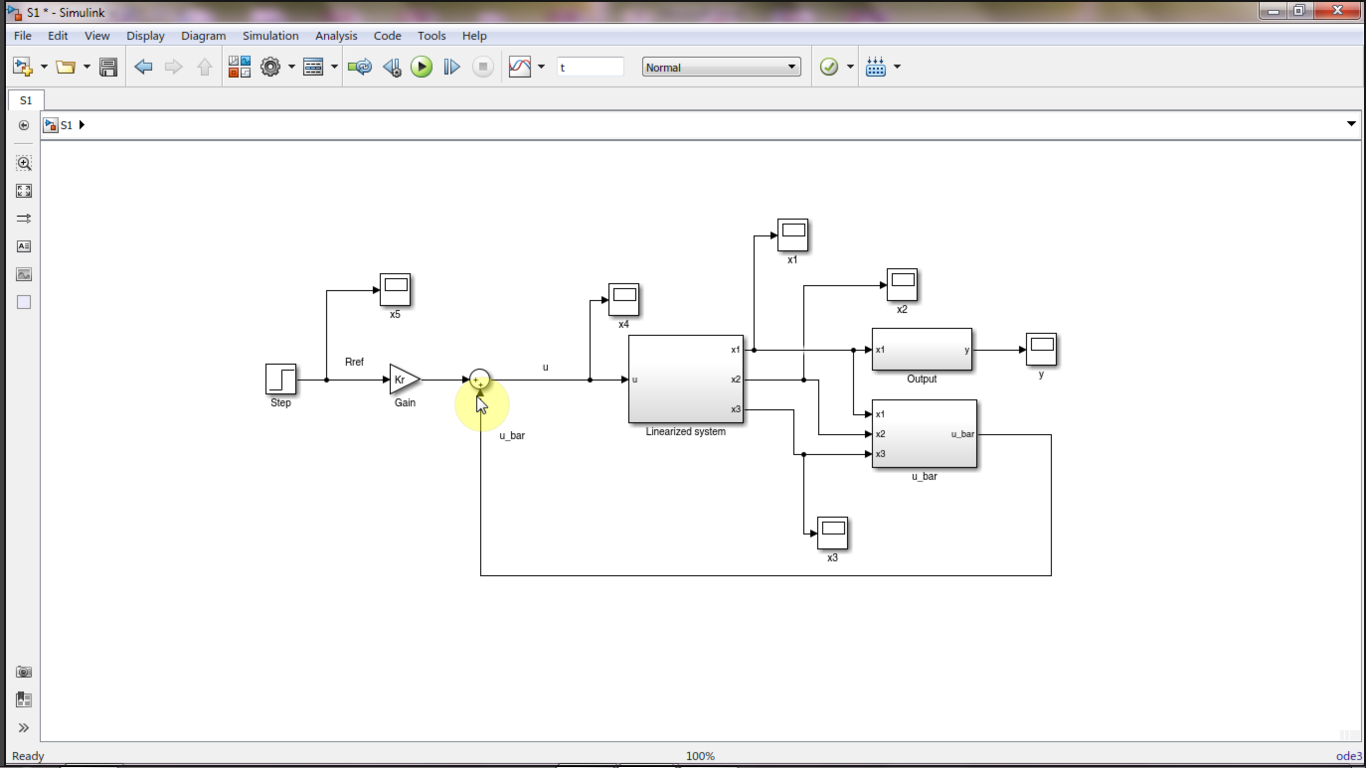
◄ طراحی سیستم حلقه بسته در سیمولینک متلب



 در تامین برق")


0 نظر